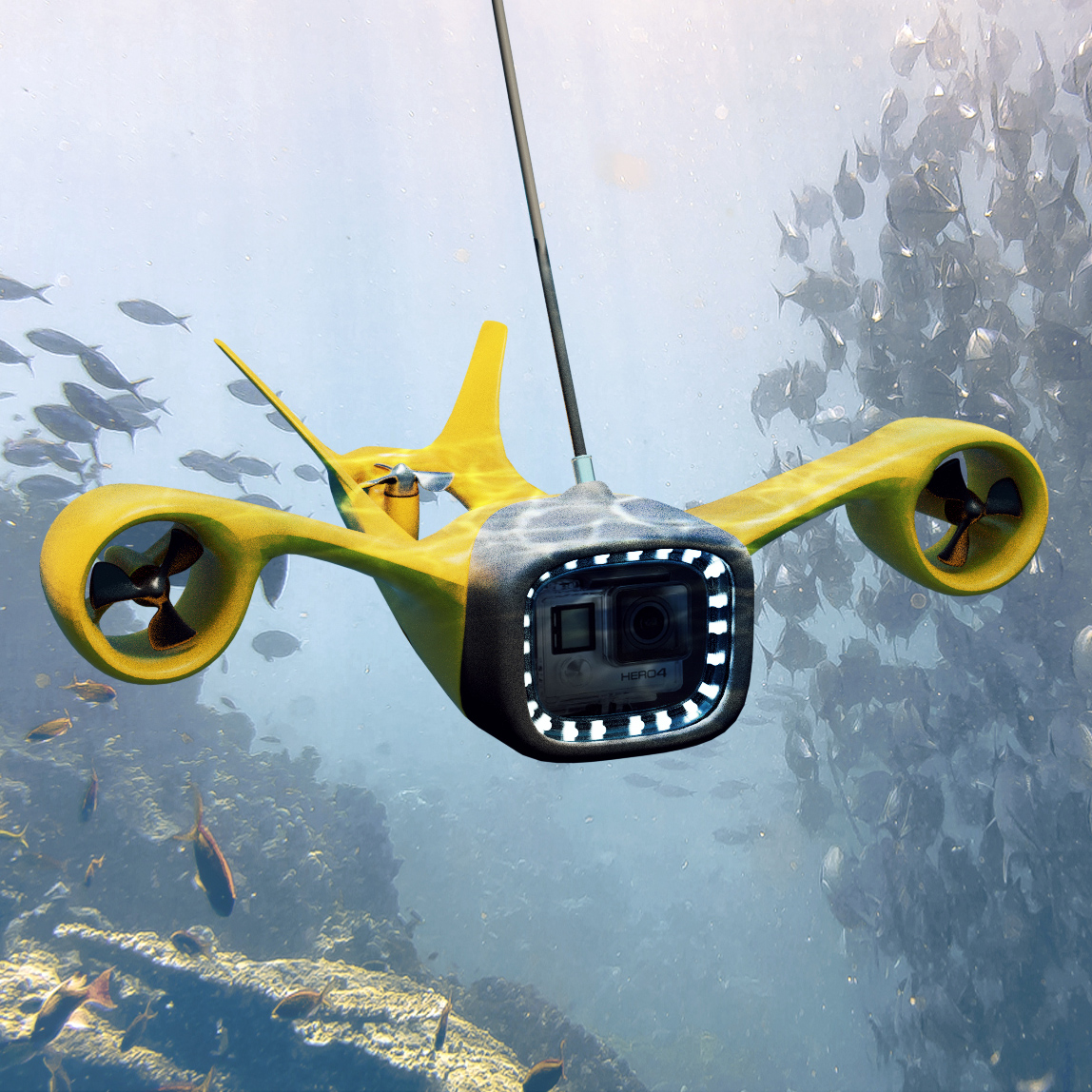
With Robor Electronics I set out to see what could happen if commercial drones were not limited to the air. The result was a platform that can combine remotely operated and (semi-)autonomous surface vessels, airborne drones, and submersibles to quickly and easily get an eye under water.
| Client: | Robor Electronics |
| Period: | 2015-2020 |
| Responsibilities: | System architecture Concept & Development drone canopy Concept & Development UDrone |


The system can be used for scenarios and new applications. From inspections and maintenance of underwater structures and all kinds of marine research to site spotting for recreational diving and first responders looking for drowning people.
A support vehicle that stays above water launches a submersible "probe". They are connected by a tether that provides power, sensor data and fast communication to the probe. The support vehicle can relay this communication to the shore wirelessly.
Splitting the system up bypasses the limitations of being under water. A flying drone can get to the site at 80 km/h. Electromagnetic signals don't travel far through water. With the tether we can have low latency, high frequency communication without having to run a cable all the way to the shore.
Using a support vehicle also simplifies the needs for the underwater vehicle. It becomes an "appendage" of the support vehicle. We can make use of the built-in functionality of off the shelf drones. This makes the platform cheaper, even with the cost of the support vehicle. It can become accessible even for hobbies like underwater photography, scuba diving and fishing.

The DJI Matrice 100 can be used as a support vehicle. We also designed a DronExpert canopy for this drone. Read more about the design of the canopy.
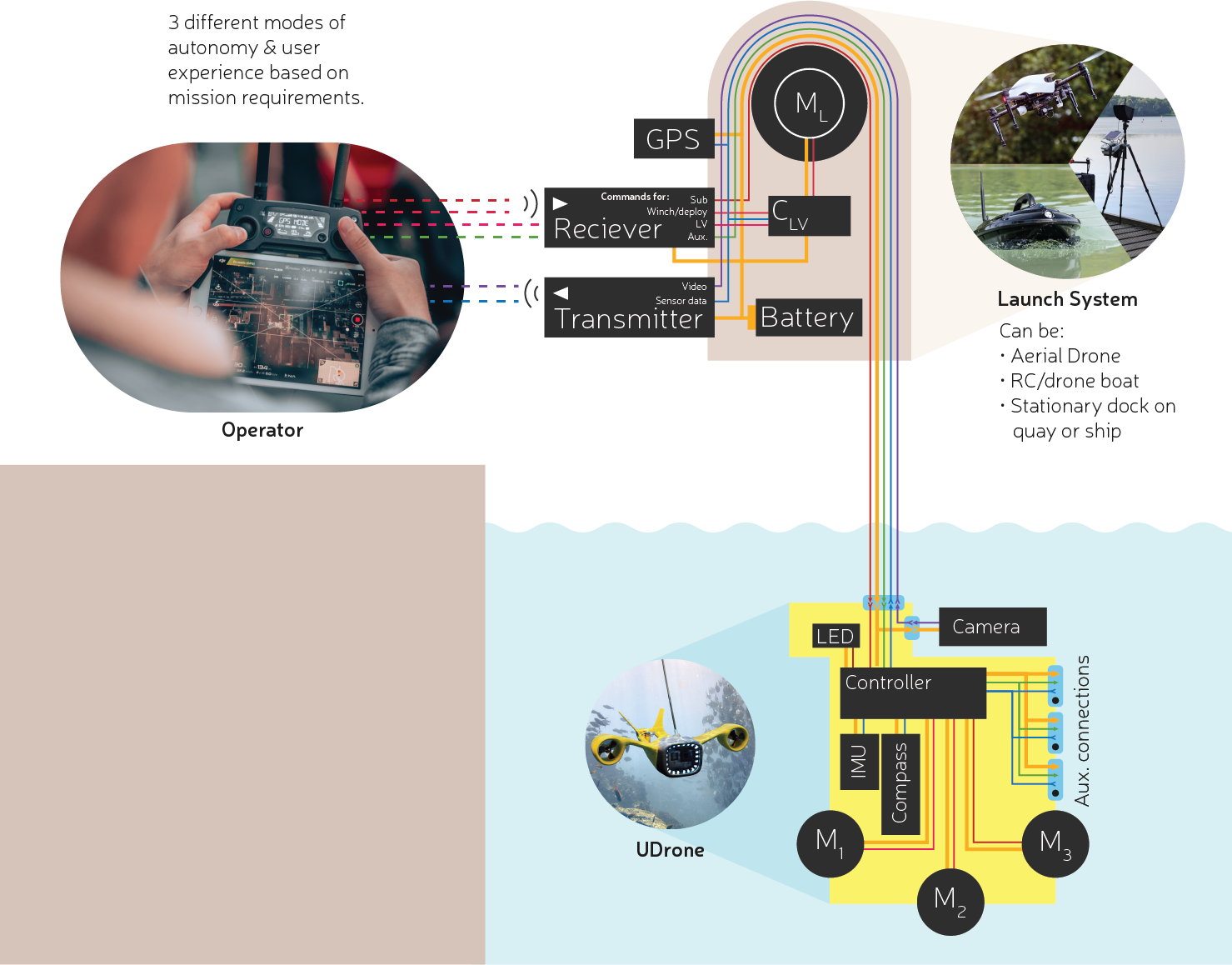
Overview of the system.
The design of the system can be adapted to many different scenarios.
The underwater vehicle might be launched from a UAV, an autonomous drone, a larger ship or the shore. Since the sub relies heavily on its launch vehicle, this variety offers a great deal of complexity to the system design.
Depending on the mission, a special sensor, sampler or actuator might be needed. Much thought had to be put into communication between system components, weight distribution and balance, and coordination.
The design of the system considers different interaction scenarios; ranging from fully manual operation for experts to fully autonomous operation.
Read more about some of the parts that I designed for the platform.
 Mark Zwart
Mark Zwart